Magnetic Levitation Haptic Interfaces
Peter Berkelman, Zack Butler, and Ralph Hollis
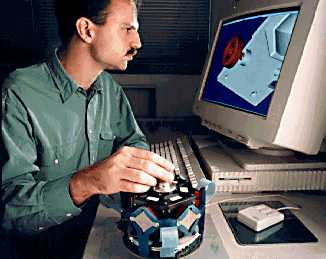
This project advances knowledge about how to give computer users convincingly real haptic (sense of touch) interaction with computers. While there has been some progress in this area, chiefly through the use of back-driven robotic-like manipulators, this is a substantially new approach which promises a qualitative leap in improvement of such capabilities: A user interacts with the computer by grasping a rigid tool whose behavioral description is computed, employing this tool to interact with computed environments which are semantically meaningful in terms of the application. At the same time, the environment exerts realistic forces and torques on the tool's handle which are felt by the user. The vision is one of providing the computer user immediate, high-fidelity, convincingly real interaction with computed environments.
The new haptic interface approach is based on a recently developed magnetic levitation technology, and on recent strong advances in the art of physically-based simulation. The magnetic levitation technology uses Lorentz forces to stably levitate and control a rigid body (which includes the handle through which the user interacts) in six degrees of freedom, giving a new and heretofore unexplored physical basis for haptic interaction.
The new simulation methods are based on special-purpose techniques that promise to be simpler, faster, and more robust than their generic counterparts.
Robust realistic physical simulation, coupled with high-bandwidth six-degree-of-freedom force reflection, has the potential to greatly improve the state of the art in the feel, performance, and capabilities of virtual environment systems for use in a wide range of human activities.
We are currently pursuing a new, more ergonomic design:
 |
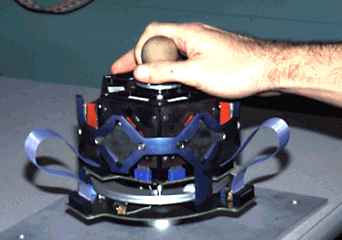
Advanced spherical design |
 |
External structure |
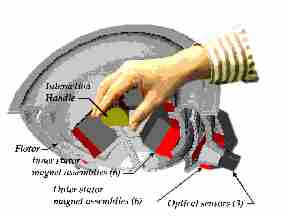 |
Cutaway view |
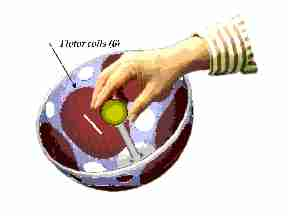 |
Interior of flotor |
 |
Interacting with a virtual tool |
 |
Flotor is transparent to the touch |
External Funding: NSF, EDRC