Interactive Simulations
Local Control Processor:
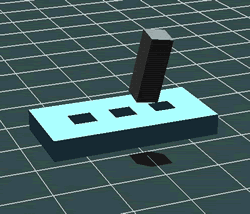
Simple, static environments can be modelled on the local controller with the graphics workstation used for display only.
|
 Box-in-Box Simulation |
|
 Surface Texture Simulation |
Device Coupled with Simulation:
For more complex simulations the haptic device can be coupled to an independently executing simulation on a different computer:
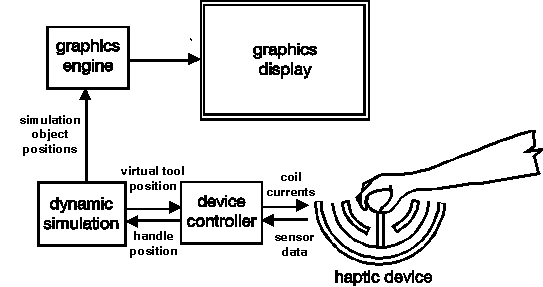
Schematic of Haptic Interaction System
The setpoints of the simulation tool and the haptic device handle are coupled together by virtual stiffness and damping gains:
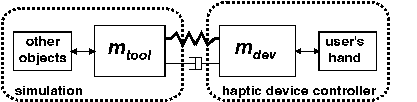
Virtual Coupling of Simulation and Device
The simulation computer and the device controller exchange position states over and Ethernet network.
Dynamic Physical Simulations:
 Peg-in-Hole |
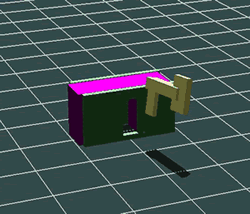 Key in Lock with Bolt |
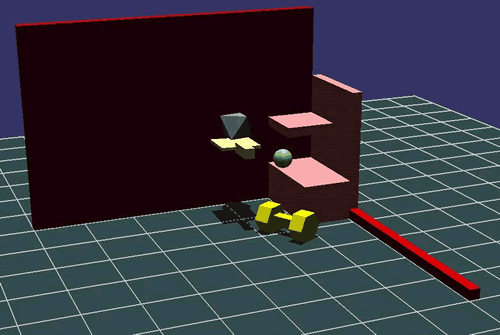
Multiple dynamic objects in simulation
- The simulation models physical dynamics, performs collision detection, and evaluates motion constraints at a 100 Hz update rate
- The user can strike, push, pick up, throw & catch simulated objects in environment and feels the computed dynamic response of the virtual tool
- Variable scaling, offsets and rate mode options are available for the user to move the virtual tool across arbitrarily large distances and rotations in the simulated environment